一、哈里斯角的不变性
Harris Corners 哈里斯角
结构矩阵:
2. 
结构矩阵:
Affine intensity change 仿射强度变化


仅使用导数=>强度偏移I->I+b的不变性
强度缩放:I ->a I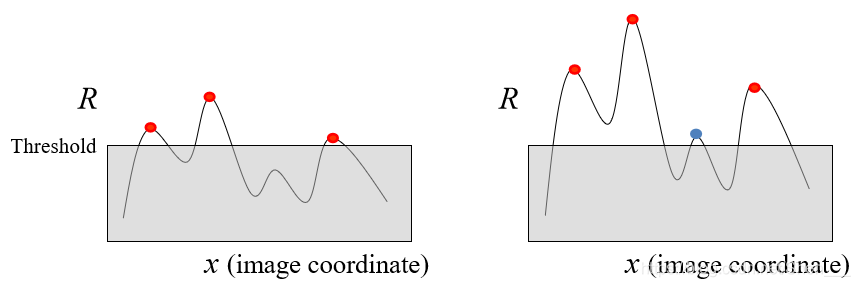
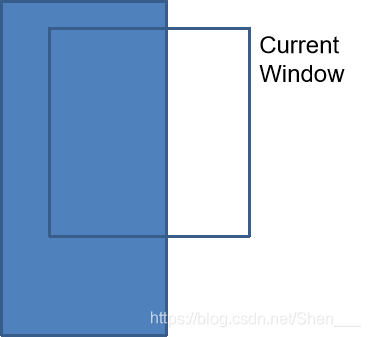
Image translation 图像翻译
导数和窗函数是平移不变的。
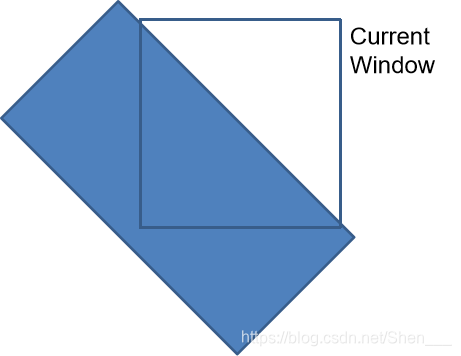
Image rotation 图像旋转
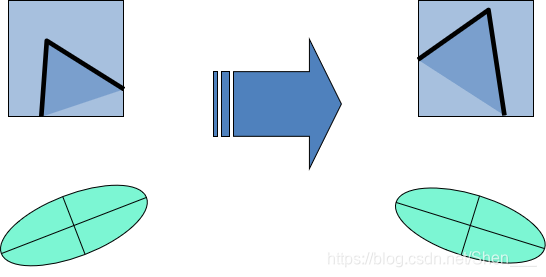
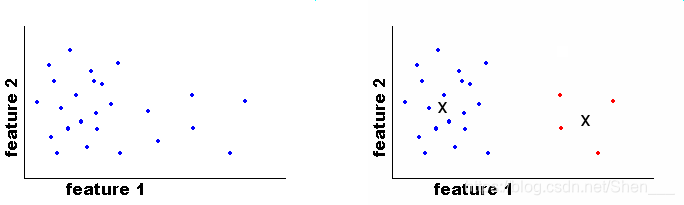
Scaling 缩放比例
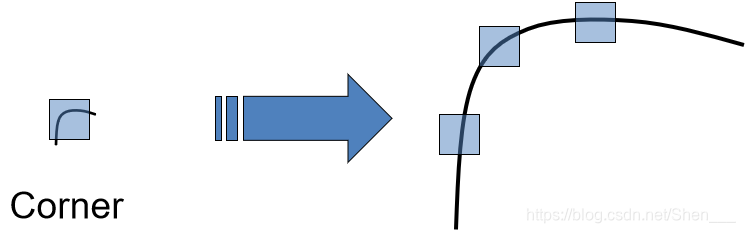
所有点都将被分类为边。
角点位置与缩放不相关!
到目前为止:可以在x-y中定位,但不能缩放。
二、特征点的“比例”
Automatic Scale Selection 自动刻度选择
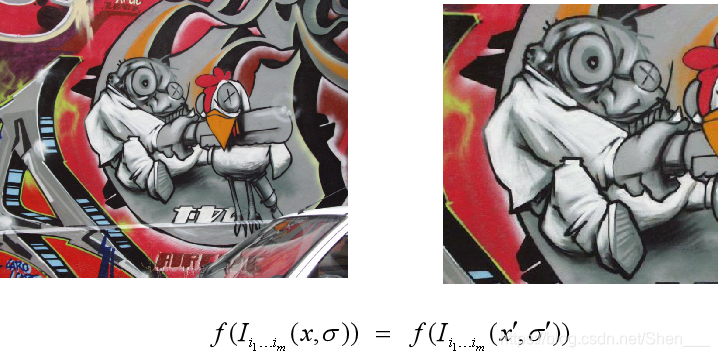
如何找到f响应相等的补丁大小?什么是好的f?
增加标度的函数响应(标度特征)。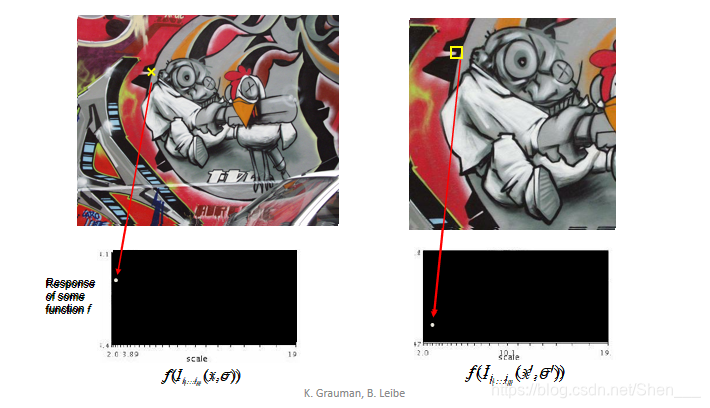
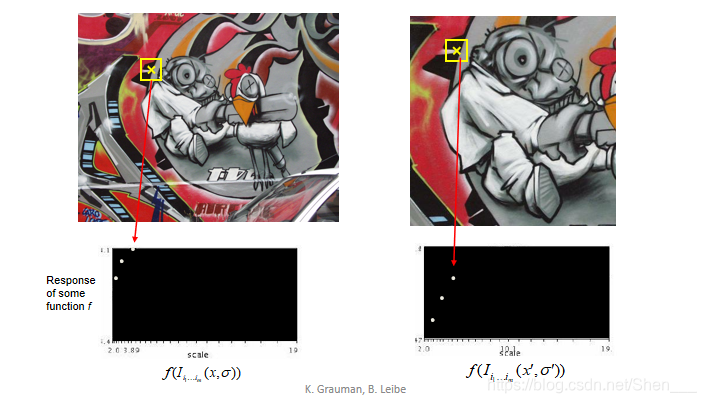
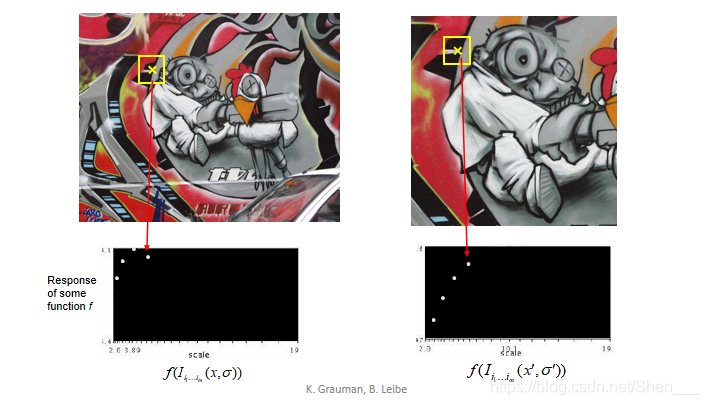
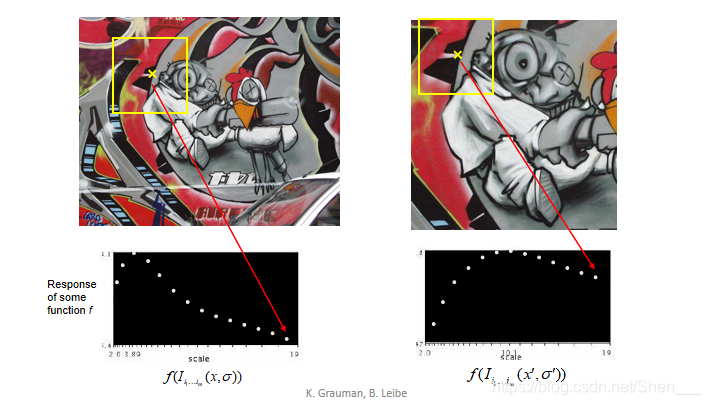
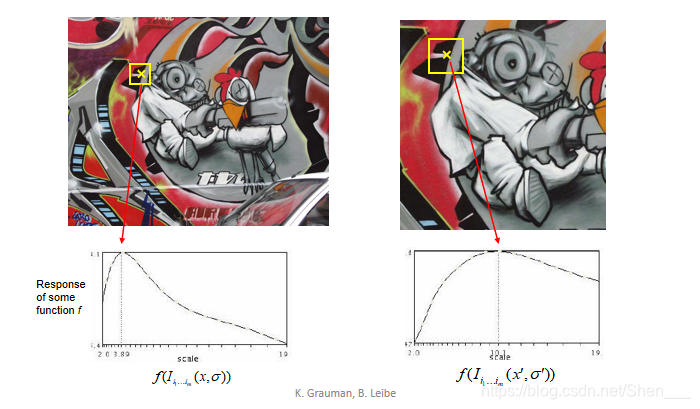
什么是有用的特征函数f?
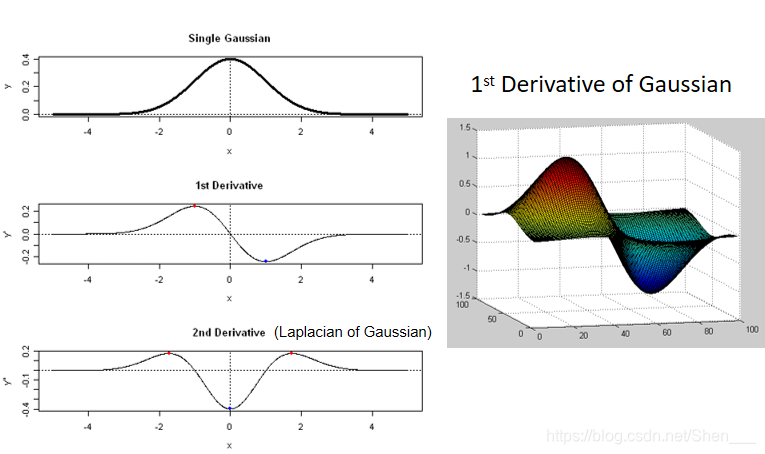
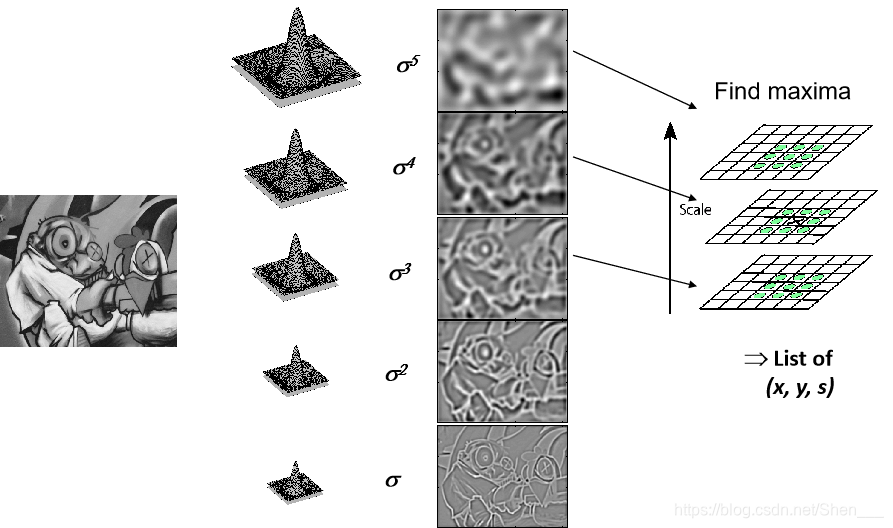
“Blob(斑点)”探测器常见于拐角处
——高斯(LoG)的拉普拉斯(二阶导数)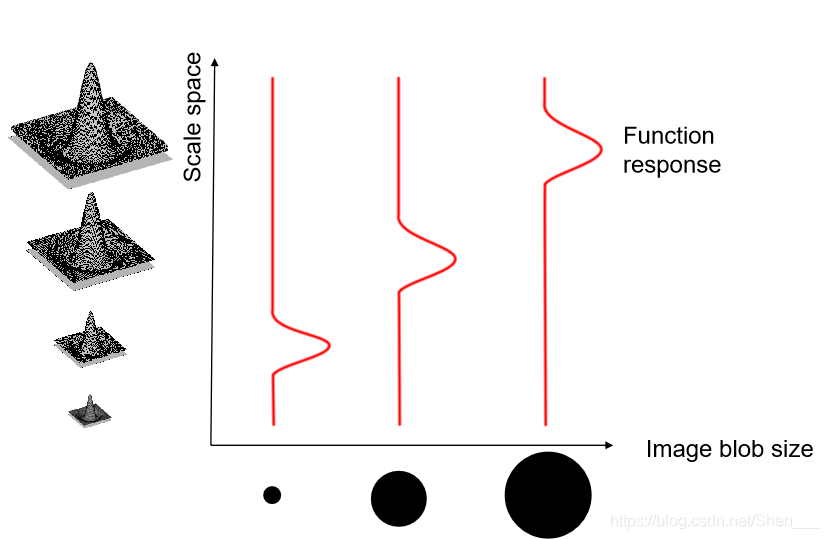
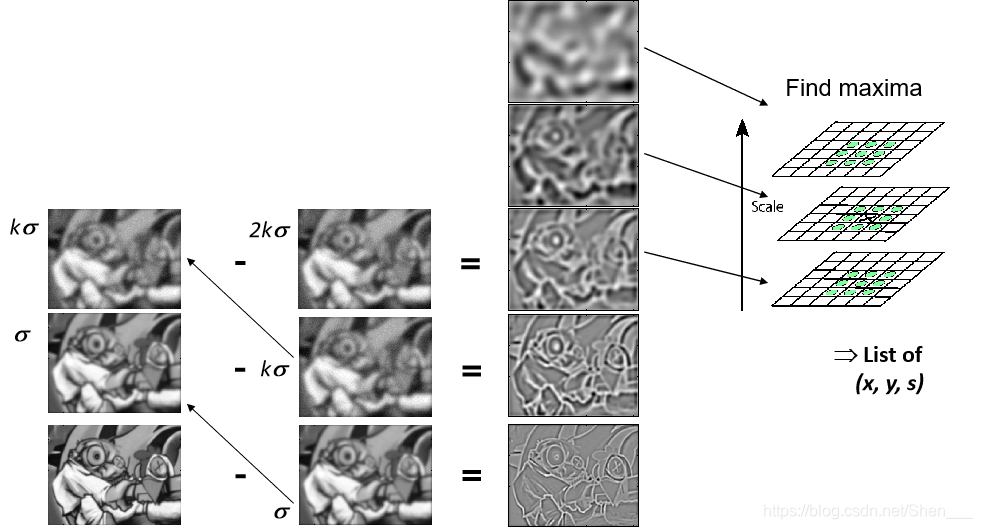
在位置标度空间中求局部极大值
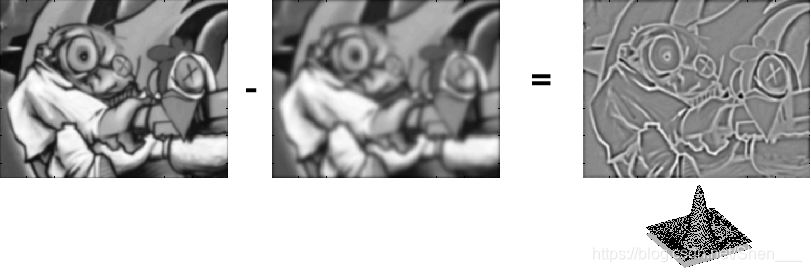
Alternative approach 替代方法
高斯差分(DoG)近似LoG: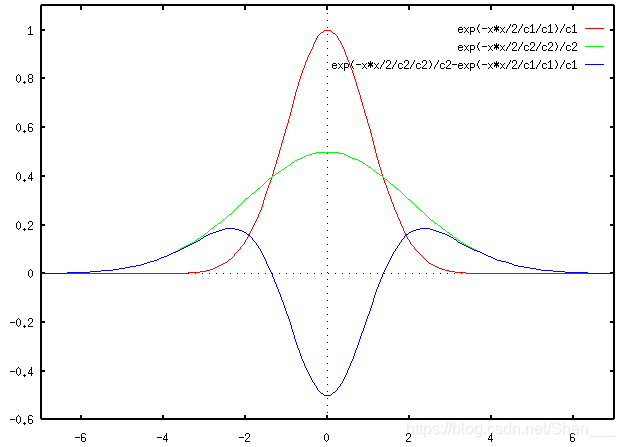
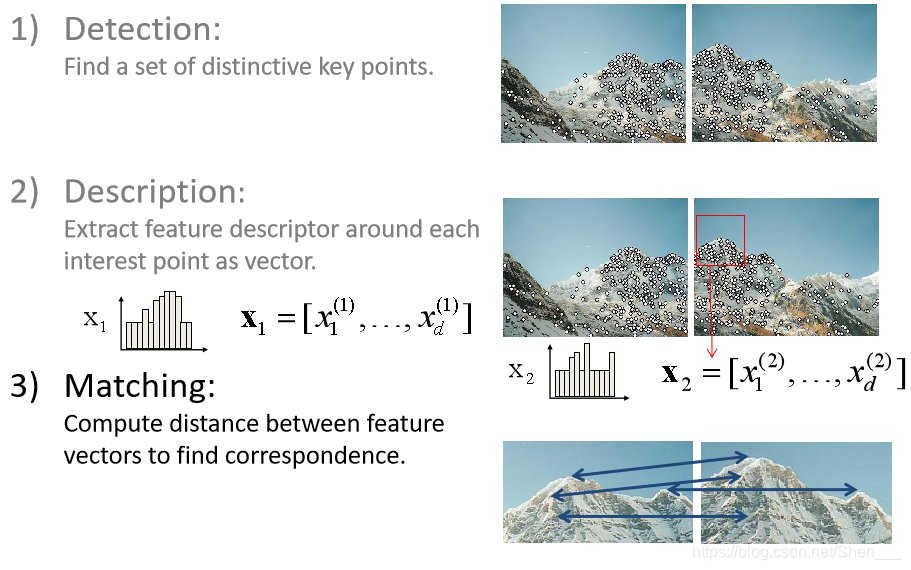
Interest points 兴趣点
关键点检测:可重复且独特
角点(Corners)、斑点(blobs)、稳定区域(stable regions)
哈里斯(Harris),DoG
选择兴趣点检测器
- 为什么选择?
用更多的探测器收集更多的点,以便进行更多可能的匹配。 - 你想要干什么?
x-y精确定位:Harris
良好的尺度局部化:高斯差分(Difference of Gaussian)
柔性区域形状:MSER - 最佳选择通常取决于应用程序
harris-/hessian-laplace/dog在许多自然类别中都很有效
MSER适用于建筑和印刷品
三、Local Image Descriptors 局部图像描述
局部特征:主要组件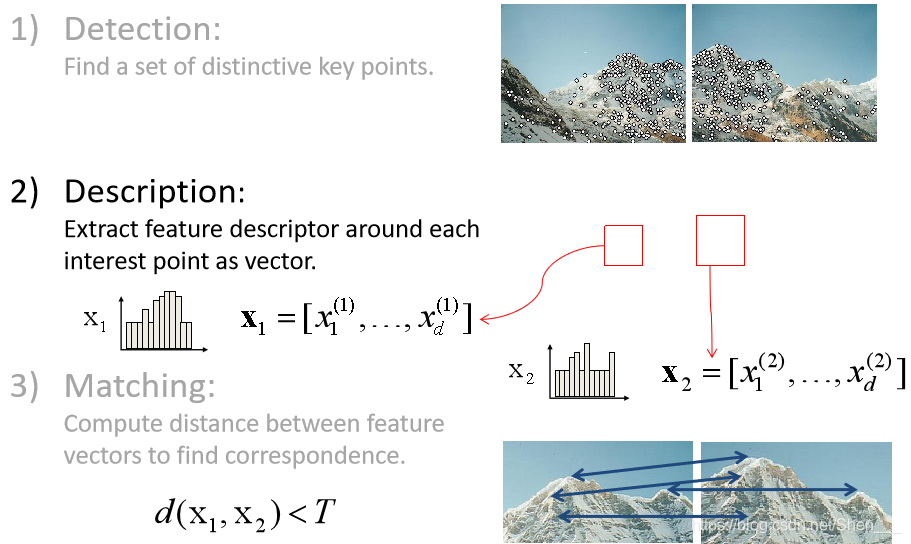
Image representations 图像表示
- 模板:强度、阶级等。
- 直方图:颜色、纹理、SIFT描述符等。
图像表示:直方图(Histograms)
联合直方图(Joint histogram)
需要大量数据
避免空箱子的分辨率降低边缘直方图(Marginal histogram)
需要独立功能
比联合直方图更多的数据(data)/bin聚类(Clustering):对所有图像使用相同的聚类中心
Computing histogram distance 计算直方图距离

直方图相交(假设为标准化直方图)
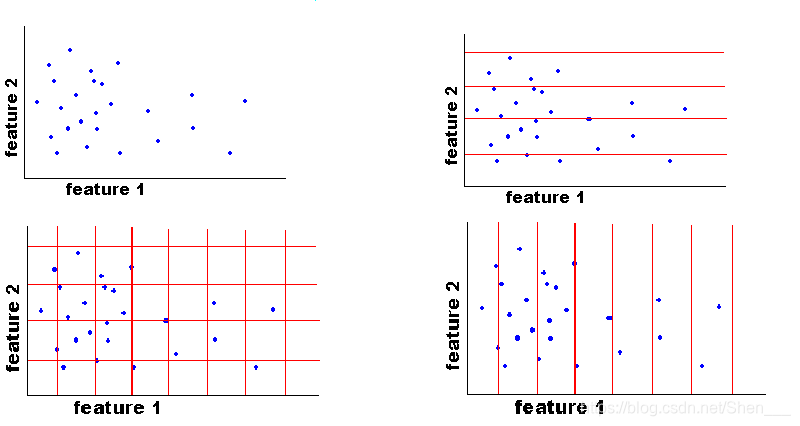
直方图:实现问题
- 量化(Quantization)
网格(Grids):快速,但仅适用于很少的维度;
聚类(Clustering):速度较慢,但可以量化更高维度的数据。 - 匹配(Matching)
直方图相交或欧几里德可能更快;
卡方检验(Chi-squared)通常效果更好;
当附近的bins代表相似的值时,土方运输机的距离(Earth mover’s distance)更有利。计算直方图的目的
- 颜色
- 模型局部外观
- 纹理
- 定向梯度的局部直方图
- sift:尺度不变特征变换——非常受欢迎(4万条引用)
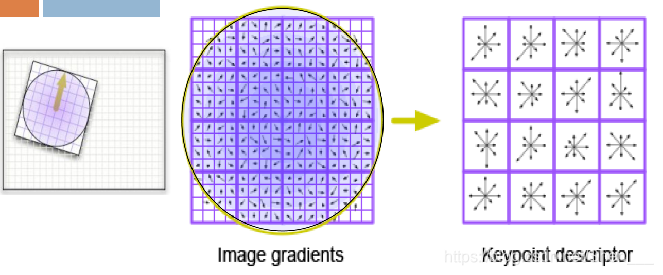
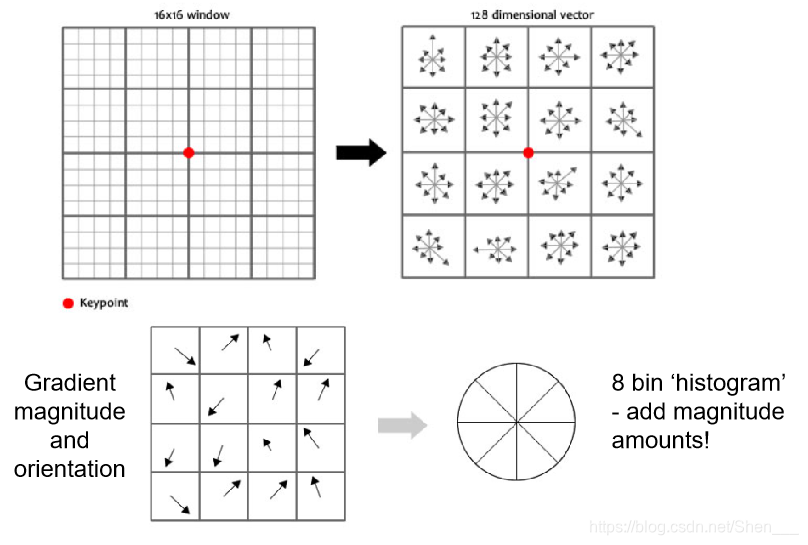
SIFT描述符格式
- 在本地16 x 16窗口进行计算。
- 根据发现的方向θ和标度σ(增益不变性)旋转和缩放窗口。
- 计算由一半窗口的高斯方差加权的梯度(用于平滑衰减)。
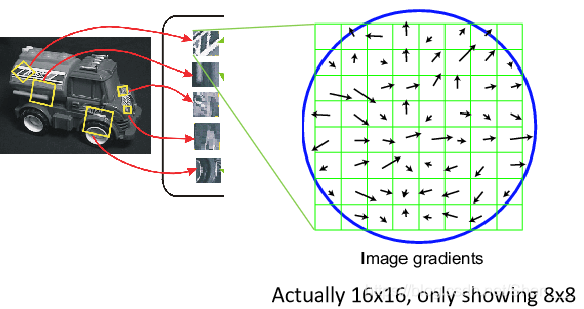
SIFT矢量形成
梯度方向直方图的4x4数组,按梯度大小加权。
按8个方向放置X 4x4阵列=128维。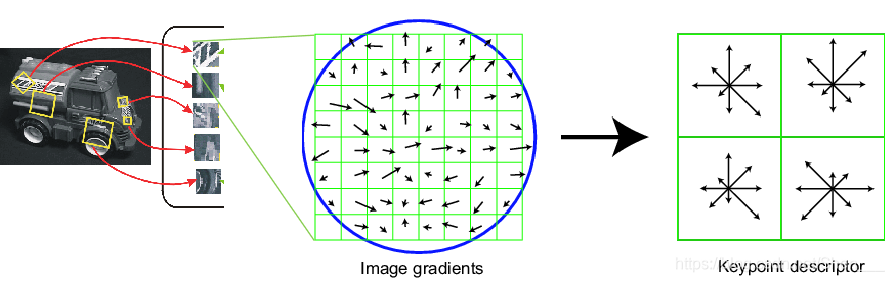
保证平滑度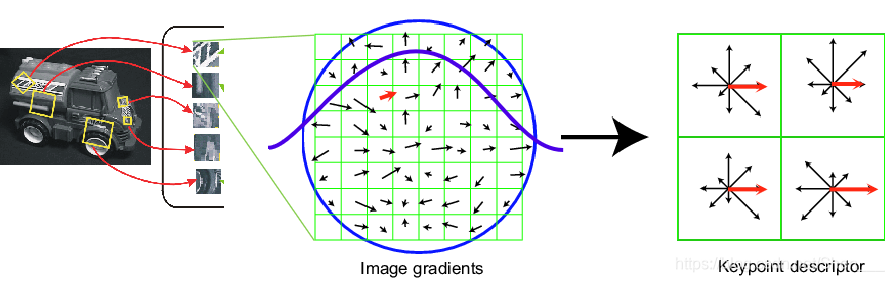
降低光源影响SIFT
- 高斯尺度空间极值的差分
- 后处理
位置插值
丢弃低对比度点
沿边消除点 - 方位估计
- 描述符提取
动机:我们希望对空间布局有一些敏感度,但不要太多,所以直方图块给了我们这些。SIFT定向规范化
计算方向直方图;
选择主导方向θ;
规格化:旋转到固定方向。SIFT描述符提取
给定具有比例和方向的关键点: - 选取与估计尺度最接近的尺度空间图像;
- 重新采样图像以匹配方向或从矢量中减去检测器的方向,使图像旋转不变性。
局部描述符:SURF
SIFT思想的快速逼近:用2D盒滤波器和积分图像进行有效计算比SIFT快6倍物体识别的等效质量局部描述符
- 大多数特性可以看作是模板、直方图(计数)或组合。
- 理想的描述符应该是:
强健有特色;
紧凑高效。 - 大多数可用的描述符关注边缘/梯度信息:
捕获纹理信息;
很少使用的颜色。
四、Feature Matching 特征匹配
Bijective 双射:
Injective 内射
Surjective 满射
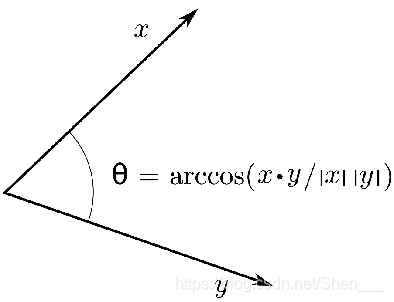
Euclidean distance vs. Cosine Similarity 欧氏距离与余弦相似性
Euclidean distance 欧氏距离


Cosine similarity 余弦


特征匹配的标准
标准1:
- 计算特征空间中的距离,例如128个Sift描述符之间的欧几里德距离
- 匹配点到最近距离(最近邻)
问题:
所有的东西都匹配吗?
标准2:
- 计算特征空间中的距离,例如128个Sift描述符之间的欧几里德距离
- 匹配点到最近距离(最近邻)
- 忽略任何高于阈值的内容(不匹配!)
问题:
6. 门槛难挑
7. 不明显的特征可能有很多相似的匹配,只有一个是正确的
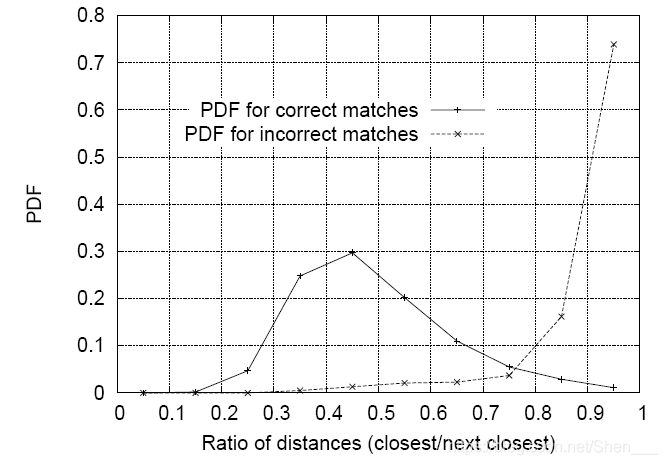
最近邻距离比
Interest points 兴趣点
- 关键点检测(Keypoint detection):可重复且独特
角点(Corners)、斑点(blobs)、稳定区域(stable regions)
哈里斯(Harris),DoG - 描述符(Descriptors):健壮和选择性
方位的空间直方图
SIFT

